

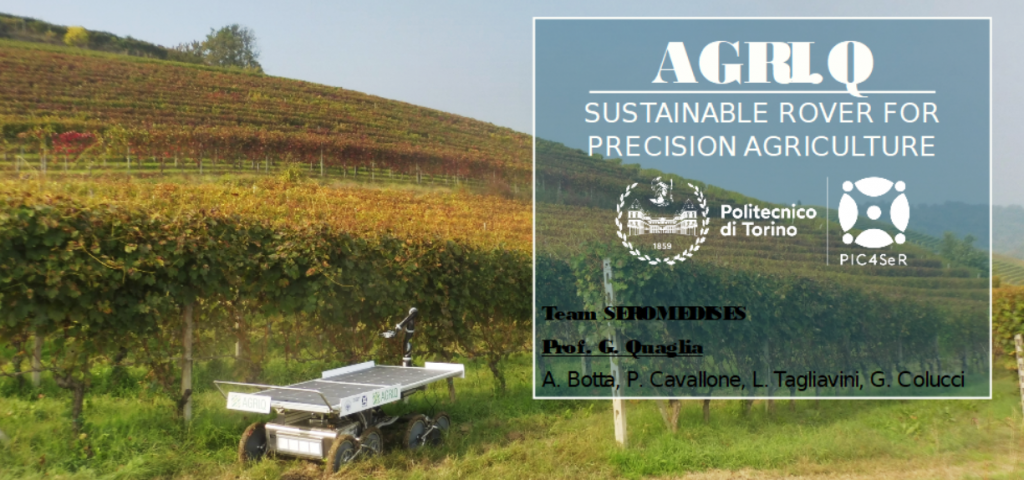
Agri.Q: il robot alimentato dall’energia del sole che si muove da solo nel vigneto. Qui raccoglie dati utili per l’agricoltura di precisione e fa risparmiare acqua, fitosanitari e rende più sana e pulita l’agricoltura.
Un frutto del lavoro del team di ricerca guidato dal professor Giuseppe Quaglia con i dottorandi Andrea Botta e Paride Cavallone del Politecnico di Torino.
Il rover è capace anche di funzionare come stazione mobile per droni. Naviga autonomamente tra i filari e su terreni sconnessi, un dato importante per l’agricoltura di collina e montagna, monitorando lo stato delle colture attraverso un sistema di visione. Agri.Q oltre a registrare i dati, può eseguire prelievi di campioni oppure operazioni sulla vigna utilizzando un braccio meccanico definito dai ricercatori: “ad elevata destrezza“.
Alimentazione con il sole

Su Agri.Q è stato montato un pannello fotovoltaico che permette di rendere energeticamente indipendente il robot e può essere utilizzato come piattaforma di atterraggio per droni. In sintesi è possibile far collaborare uno o più droni con il rover, in modo da monitorare il vigneto in maniera ancora più efficace combinando rilevamenti puntuali e da remoto.
I pannelli sono di Solbian, l’impresa del navigatore oceanico Giovanni Soldini, che da anni sperimenta pannelli ad alto rendimento nella vela (anche il giro del mondo in solitaria), nella nautica fino a riuscire a vendere, impresa non facile, i pannelli ai cinesi (leggi qui). Il pannello fotovoltaico è in grado di auto-orientarsi per massimizzare la raccolta della “luce” da trasformare in energia durante l’auto-ricarica.
La sostenibilità è al centro del progetto. Oltre all’abbattimento delle emissioni grazie alla propulsione elettrica e l’alimentazione solare, è possibile realizzare tecniche colturali dal basso impatto ambientale, basato sul risparmio dell’acqua e dei trattamenti fitosanitari. Un metodo basato sulla raccolta, l’analisi e la gestione dei dati del campo, con l’obiettivo di migliorare la conoscenza e la gestione del suolo e delle risorse, per prevedere e gestire le colture. C’è la sostenibilità ecologica e anche economica grazie al risparmio ottenuto e alla migliore resa agricola. La strategia è permettere agli agricoltori di variare e modulare le azioni per soddisfare le diverse condizioni del suolo e delle colture
Meno pesticidi, più salute le piante
Uno degli aspetti più interessanti dell’agricoltura di precisione è che permette di migliorare la gestione delle colture e ridurre i costi di utilizzo. In particolare attraverso la gestione di prodotti agrochimici che evitano l’uso improprio o l’applicazione inutile di fertilizzanti e pesticidi.
Abbiamo sentito il professor Giuseppe Quaglia che ci ha precisato alcuni elementi del progetto. Gli chiediamo della piattaforma dedicata ai droni: “Una parte del suo telaio si è evoluto per diventare anche in una piattaforma di atterraggio droni dove potenzialmente è possibile sviluppare attività di ricarica“.

A proposito chiediamo al professore dell’autonomia: “Fermo restando che si tratta di un prototipo e non di un prodotto sul mercato siamo sulle 6/7 ore di autonomia senza il contributo dei pannelli fotovoltaici“.
Con l’energia trasformata “in una giornata con un ragionevole irraggiamento l’autonomia si estende del 50%. Attenzione queste stime devono fare i conti con le funzioni, se si muove su un terreno agricolo collinare a forte pendenza questo, più o meno, è l’ordine di grandezza“. Al contrario se si muove in un terreno meno sconnesso e “un territorio pianeggiante l’autonomia può crescere“. Questi i primi dati del prototipo su cui si deve ancora lavorare.
Cosa fa il robot ? Non solo propulsione
Il rover è dotato di un braccio robotico: “Abbiamo cercato di implementare le specifiche relative alla manipolazione e raccolta di campioni, in termini di frutto e dal suolo. Stiamo cercando di implementare sistemi di visione che identificano la posizione del target“.

Un esempio? “Se si va a raccogliere un grappolo d’uva manualmente nessuno si pone il problema di come usare le mani e l’operazione riesce. Il grappolo rimane nelle mani dell’agricoltore. Nel caso del robot si parla di posa dell’arto, quando si muove non riflette su quale orientamento deve avere la mano di presa. Si muove invece da posizione di raccolta a posizione di deposito in una cesta, per certi frutti come l’uva bisogna garantire anche l’orientamento“.

Agri.Q non si limita quindi alla navigazione e alla raccolta dati, si stanno sviluppando degli utensili da aggiungere al braccio robotico. “Stiamo lavorando ad un utensile che prima fa l’afferràggio e poi il taglio“. La macchina oggi non è un mezzo operativo: “ma può diventarlo aggiungendo dei moduli. Uno dei concetti chiave della mobilità robotica e la modularità“.
Interessante la locomozione: “Un sistema a otto ruote perché quando ci si muove su terreni con forte pendenza si pensa ai cingoli, ma il veicolo cingolato ha un consumo energetico maggiore rispetto a uno con le ruote”. Queste si moltiplicano e permettono “di avvicinarsi alla capacità di trazione del cingolo ma mantenendo l’efficienza tipica della ruota“. Inoltre la leggerezza – non si va oltre i 112 chili – permette di trasportare con più facilità il robot.
Ricerca premiata a livello internazionale
La ricerca che nasce nel Dipartimento di Ingegneria Meccanica e Aerospaziale-DIMEAS e del Centro Interdipartimentale PIC4SeR, con i dottorandi Andrea Botta e Paride Cavallone seguiti dal professor Quaglia – ha vinto il premio Best student paper award della conferenza I4SDG 2021, (IFToMM 4 Sustainable Development Goals). Prestigioso riconoscimento internazionale. Il lavoro prende il nome di “Robotics Applied to Precision Agriculture: the Sustainable Agri.Q Rover Case Study”.
Gli aspetti teorici e pratici nel settore della meccanica applicata trattati nella ricerca mirano a contribuire al raggiungimento di più tra gli Obiettivi di Sviluppo Sostenibile fissati dall’Agenda 2030 delle Nazioni Unite.