

Inzia con questo articolo la collaborazione dell’ingegner Vittorio Milani. Già dirigente d’azienda in ambito multinazionale automotive e non solo, ora consulente aziendale, si presenta così: «Appassionato della prima ora ai temi della mobilità elettrica e della transizione energetica, ultimamente mi cimento come divulgatore per le cose che un po’ conosco. Credo nella tecnologia perché non crederci è peggio». Da oggi i suoi articoli compariranno nella rubrica «La stanza dell’Ingegnere».
Quando la coppia è una chiacchiera da bar
di Vittorio Milani
Che si parli di motori termici o di motori elettrici ci troviamo sempre a fare i conti con questo concetto ostico e non facile da digerire del tutto. Proviamoci.
«Hai visto che è uscito il nuovo modello tal-dei-tali? Ha ben 600 Newton di coppia!». Non è raro sentire al bar o leggere in un blog affermazioni del genere (più grave se lette in articoli specializzati del settore). L’errore non risiede tanto nell’eventuale espressione dell’unità di misura (la coppia si misura in Nm, e si pronuncia Newton-metro, tutto attaccato) ma nel “messaggio” che finisce per essere trasmesso, ovvero che un’auto con 600 Nm di coppia sia più prestazionale, o comunque migliore, di un modello che magari ha “solo” 550 Nm di coppia. Vediamo di capire perché non è così, e di vederci un po’ più chiaro quando si parla di coppia (e inevitabilmente di potenza).
Tutto inizia dalla forza
Quando parliamo di auto parliamo di cose che si muovono, e la fisica ci insegna che per muovere qualunque cosa è necessario imprimergli una forza. Poi, raggiunta una certa velocità, se azzeriamo questa forza, l’auto – o quello che è – inizia a rallentare per effetto delle forze di attrito. A questo punto per mantenerla ad una velocità costante è necessario continuare ad applicare una forza motrice che non sarà più “usata” per accelerare ma per pareggiare i conti con le forze di attrito.
Sarebbe troppo bello se raggiunta una certa velocità potessimo staccare il piede dall’acceleratore e proseguire senza consumare più nulla, per inerzia pura, come un disco da hockey su una pista di ghiaccio, ma purtroppo, nel mondo reale non funziona così, perché il mondo reale è un mondo dove non esiste il moto perpetuo.
Ma andiamo con ordine. Parliamo di moto lineare, come quello di un’auto che procede dritta. La seconda legge della dinamica ci dice che:
F = m * a
dove
-m = massa in kg
-a = accelerazione (cioè aumento della velocità, che si misura in metri / secondo-quadrato)
La formula si può scrivere anche così:
–a = F / m.
Quest’ultima espressione ci dice che è possibile imprimere un’accelerazione ad una massa solo se su di essa agisce una forza. Teniamo presente questo concetto e passiamo alla coppia. Se la forza, che è un vettore, è rivolta in senso contrario al moto l’auto subirà una decelerazione.
Quando le cose girano entra in scena la coppia
Immagiamo di dover stringere un dado con una chiave inglese lunga 20 cm. Le prescrizioni del manuale dicono di applicare una coppia di serraggio di 20 Nm. Possiamo eseguire l’operazione spingendo una chiave in un punto situato a 10 cm dal centro di rotazione – il centro del dado – con una forza perpendicolare di 200 N oppure a 20 cm con una forza di 100 N. Alla fine il risultato sarà lo stesso, il dado risulterà stretto con una coppia di serraggio di 20 Nm.

Vediamo di capire cosa è successo introducendo il concetto di coppia. La coppia C – o “momento della forza”- è definita come il prodotto della forza per la distanza (presa in perpendicolare) dal punto di applicazione, il cosiddetto “braccio”:
C = F * d
dove
F = forza
d= componente perpendicolare della distanza della forza dal centro di rotazione, nell’esempio rispettivamente d1 = 0,1 m e d2= 0,2 m.
L’unità di misura della coppia C è il Nm (Newton-metro). Quindi, nei due casi, si ha:
Primo caso : C1 = 200 * 0,1 = 20
Secondo caso : C2 = 100 * 0,2 = 20
Quella che abbiamo visto però è una situazione statica perché il dado, una volta serrato si blocca o, in ogni caso, noi cessiamo di spingere la chiave avendo finito l’operazione.
L’applicazione della coppia, come pure di una forza, non determina necessariamente movimento (se spingete un muro con tutta la forza che avete il muro non si muove, idem se continuate a stringere il dado già ben serrato). La coppia diventa interessante quando l’oggetto sul quale applichiamo la coppia può muoversi di un moto rotatorio, cioè quello che accade in un motore. Esaminiamo quindi il motore endotermico perché si presta bene per cogliere i concetti fondamentali.
La coppia del motore: da dove arriva?
Qualsiasi motore rotativo è, per definizione un generatore di coppia, in pratica utilizza un certo tipo di energia (benzina, energia elettrica, vapore, carbone) per fornire una coppia su uno o più alberi rotanti in uscita. Lo schema riportato sotto che andiamo ad esaminare si riferisce ad un motore a ciclo otto/ diesel. La miscela brucia espandendosi e spingendo il pistone. Questa forza lineare è trasformata in un moto rotatorio attraverso il cinematismo biella-manovella.
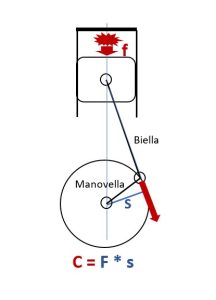
Moltiplicando in ogni istante il valore di F per il braccio s si ha il valore istantaneo della coppia C. Poiché s varia durante il ciclo di 360 gradi e la fase attiva (quella che genera la forza) avviene ogni due giri, il valore di C sarà la media della coppia istantanea sprigionata in ogni istante durante le 4 fasi. Poi sappiamo che i motori reali hanno più cilindri con fasi “sfalsate” e che all’asse del motore è applicato un volano. Tutto ciò permette di livellare la coppia reale che il motore trasmette a valle.
Per inciso, nel motore elettrico non esistono questi problemi, tutto nasce giù fluido e livellato.
Il “calcio nel sedere” dei motori termici
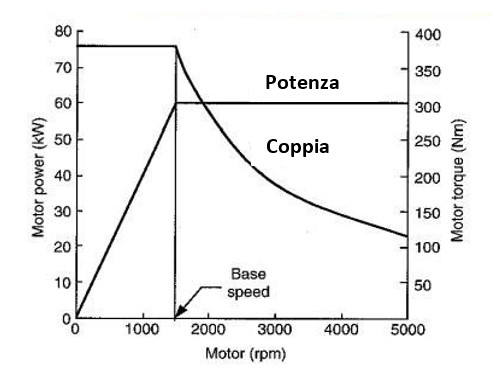
All’inizio parlavamo di coppia massima. Capiamo cosa vuol dire. Immaginiamo di spingere il piede a tavoletta e misurare la coppia ai vari giri regimi di rotazione. Otteniamo il classico grafico delle curve coppia-potenza dei motori termici. Nel grafico ne è rappresentato uno tipico di un motore diesel.
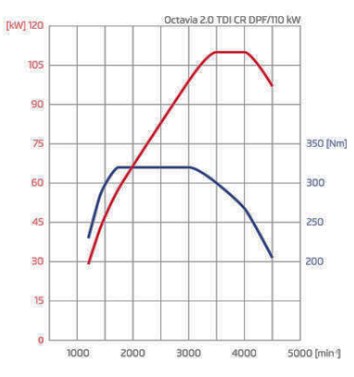
Sottolineiamo il fatto che questi grafici rappresentano la condizione “piede a tavoletta”, e che quindi non rappresentano la situazione di normale utilizzo ma le massime prestazioni del motore. Detto questo, sappiamo tutti che sotto un certo numero di giri (il cosiddetto “minimo”) il motore si ferma perché la coppia è talmente bassa da non riuscire a mantenere le masse meccaniche interne in movimento.
Con il salire del numero di giri (quindi della velocità dell’auto) la coppia cresce. Questa è la fase piacevole in cui si sente la spinta. Ad un certo punto però la coppia raggiunge il suo valore massimo appiattendosi.
Il punto più alto della coppia è proprio il numero che viene messo nelle schede delle caratteristiche del motore, che è sempre accompagnata dal regime cui corrisponde tale valore: coppia massima X Nm a Y giri/min. Poi la curva si mantiene per un po’ abbastanza piatta, e le cose vanno ancora bene, ma salendo di giri (e quindi aumentando la velocità) la curva inizia a decrescere perché il motore gira troppo veloce e perde la capacità di sfruttare al meglio la combustione.
Questo è il momento in cui sentiamo la necessità di passare ad una marcia superiore (parleremo tra poco del cambio) perché il veicolo sta perdendo spinta, anzi, più si insiste ad aumentare i giri e meno spinge: è una brutta sensazione. Se abbiamo compreso bene questo aspetto possiamo concludere che, ai fini di una guida piacevole, non serve tanto una curva con un picco alto e concentrato in un range di giri stretto, piuttosto una curva che salga rapidamente e rimanga “piatta” a lungo con il crescere dei giri.
E la potenza?
Non possiamo parlare di coppia ignorando il suo frutto principale, che poi è quello che conta davvero, ovvero la potenza, la cui curva infatti compare sempre nei grafico dei motori. La potenza non è nient’altro che la coppia moltiplicata per la velocità di rotazione (che si esprime in radianti al secondo” e con il simbolo ω (pr. omega), ma il concetto non cambia se continuiamo a pensarla in “giri al minuto”.
P = C * ω
si misura in kW (Kilowatt) oppure più tradizionalmente in CV (cavalli, un kilowatt vale a 1,36 CV
La potenza è una grandezza fondamentale perché esprime l’energia erogata dal motore. Come si vede dal grafico, l’andamento della potenza segue il destino della coppia. Osserviamo che quando la coppia inizia a scendere la potenza continua comunque a crescere, grazie ai giri che crescono, mai poi, quando la coppia è scesa troppo, anche la potenza inizia a calare, da cui la caratteristica forma della linea “a uncino”. Limitiamoci per ora a tenere presente il concetto: la potenza è “coppia per velocità” ed esprime il lavoro (energia) eseguito nell’unità di tempo. Come per la coppia esiste il punto più alto della curva, che esprime la famosa potenza massima del motore.
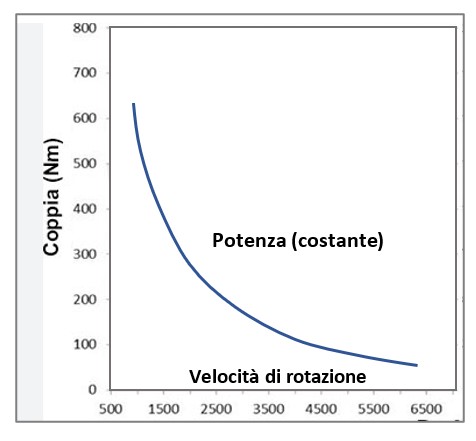
Se avessimo un motore ideale che anziché erogare la coppia massima ad un certo numero di giri la erogasse subito (a zero giri) e poi mantenesse costante la potenza avremmo un motore con una curva molto differente, come quella che vedete sotto. La si ottiene sempre dalla formula P = C * ω che può essere scritta come C = P / ω che disegna l’iperbole del grafico. Un motore che si avvicina a comportarsi così esiste, ed è il motore elettrico. Questo spiega le impareggiabili sensazioni di spinta forte, immediata e continua che caratterizzano l’auto elettrica.
La coppia alle ruote: è quella che conta davvero
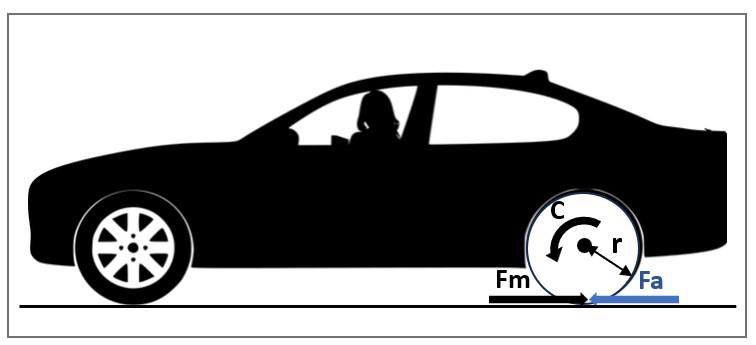
La coppia di cui si parlava quando spiegavamo i grafici di coppia-potenza è quella prelevata dall’albero d’uscita del motore. Ma quella che in realtà serve per far muovere l’auto è la coppia alle ruote, dove avviene la trasformazione da coppia a forza di trazione (grazie all’attrito). La coppia C che arriva alla ruota è trasformata in forza motrice secondo la formula F = C / r, dove r è il raggio della ruota. La forza Fa che spinge di fatto l’auto è resa possibile dagli attriti (ne parliamo in un articolo ad essi dedicato).
Il cambio è dispositivo fondamentale per le auto a motore termico, mentre praticamente non serve per le elettriche, e se abbiamo compreso il grafico del motore ideale abbiamo capito il perché. Ma oggi parliamo di coppia e quindi non possiamo ignorare quel dispositivo che con la coppia “ci gioca” tutto il tempo.
Osserviamo questo disegno che rappresenta due ruote dentate. La più piccola (ruota conduttrice) è collegata al motore che le fornisce una coppia C1 alla velocità ω1.
Il mestiere del cambio? Scambiare coppia con velocità
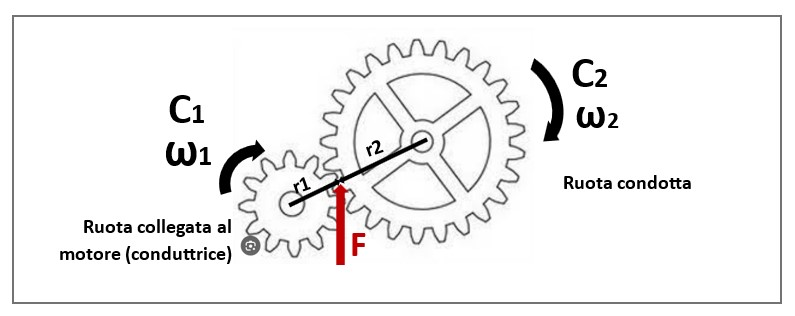
Notiamo subito che velocità della seconda ruota (ruota condotta) è determinata rigidamente dal rapporto tra i numeri di denti dei due ingranaggi, che sono proporzionali alla lunghezza dei raggi r1 e r2. In pratica la velocità della seconda sarà ridotta in ragione del rapporto tra il numero di ingranaggi delle due ruote (ovvero dei raggi delle ruote):
Il rapporto tra le velocità ω1 / ω2 è detto rapporto di riduzione che dice di quanto è ridotta la velocità della seconda ruota, e vale la relazione
ω1 / ω2 = r2 / r1
Se nel nostro esempio r1 = 0,02 m e r2 = 0,06 m, il rapporto di riduzione vale 0,06/0,02 = 3, cioè la seconda ruota gira a un terzo della velocità della prima.
Ipotizziamo che ω1 = 15.000 giri/min
Riscriviamo la formula in funzione di ω2:
-ω2 = ω1 * (r1 / r2)
-quindi ω2 =15.000 * (0,02 / 0,06) = 5000 giri/min
Abbiamo detto delle velocità di rotazione, vediamo che succede alla coppia. Nel punto di contatto dove si esercita la forza F, per la prima ruota vale la relazione F = C1 / r1 (secondo la formula di definizione della coppia), per la seconda F = C2 / r2 (F è sempre uguale, è la forza di azione e reazione che le due ruote si scambiano).
Quindi si ha:
-F = C1 / r1 = C2 / r2
Che possiamo scrivere così:
-C2 = C1 * (r2/r1)
Se nel nostro esempio supponiamo che la coppia sulla prima ruota sia C1 = 100 Nm. Calcoliamo C2:
-C2 = (0,06 /0,02) * 100 = 300 Nm
Abbiamo triplicato la coppia della seconda ruota, la cui velocità si è ridotta nella stessa proporzione. In ogni caso, se è vero che la coppia può essere incrementata a piacimento, ciò non vale per la potenza, come ovvio che sia perché l’energia non può crescere a piacimento. Valendo sempre la definizione P = C * ω, vale sempre il rapporto C2 / C1 = ω1 / ω2.
La regola generale, dunque, è che accoppiando ruote di diversi diametri è possibile MODIFICARE A PIACIMENTO IN MODO INVERSO COPPIA E VELOCITA’. Se invertiamo le due ruote, cioè rendiamo conduttrice quella più grande otteniamo una diminuzione di coppia e un aumento di velocità. Questo compito di “giocare con la coppia” è esattamente il compito di quel dispositivo che si chiama “cambio” la cui importanza (nei veicoli termici) consiste nell’adeguare la coppia erogata alle ruote motrici al valore più adatto per le condizioni di avanzamento del veicolo in una certa situazione, ad esempio per accelerare velocemente, o per affrontare una salita, oppure per viaggiare a velocità costante facendo sempre lavorare il motore nelle sue condizioni migliori in termini di efficienza e minor consumo.
Quanto conta la coppia massima di un’ endotermica?
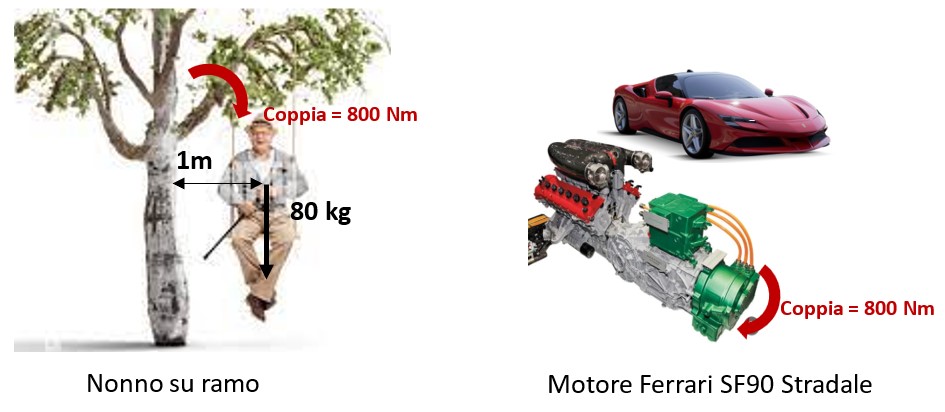
Come si diceva all’inizio, il valore di coppia massima è un dato su cui si potrebbe tranquillamente sorvolare perché non dice molto se non è accostato alla velocità di rotazione e soprattutto alla forma della curva di erogazione ai vari giri del motore. In fondo un uomo di 80 kg seduto su un ramo lungo 1 m produce una coppia (alla base del ramo) di 800Nm, come il motore di una supercar…
Cerchiamo di capire meglio con un esempio. Prendiamo un’auto a con motore aspirato a benzina con 100 CV e una turbodiesel di pari potenza massima. Messe a confronto faranno lo 0-100 negli stessi tempi, anche se con una sensazione diversa (spinte più brevi e forti col turbodiesel, più regolare e lunghe con il benzina). Eppure, se si guarda nella scheda del motore il valore della coppia massima, il turbodiesel avrà oltre 50% di coppia massima in più.
Diesel e benzina: come cambia la curva di coppia
Guardiamo però un grafico che mette a confronto due curve di coppia tipiche di un diesel e di un benzina:

Nel diesel la coppia è subito molto più alta ma cala molto prima e più repentinamente. Ne segue che le marce devono essere maggiormente demoltiplicate (attraverso un riduttore con un rapporto maggiore rispetto a quello dell’auto a benzina) in modo da “barattare” fin da subito coppia (che ha in abbondanza) con velocità, che invece scarseggia. Alla fine, la coppia alle ruote avremo un valore medio molto simile tra i due tipi di motorizzazione, e questo spiega perché accelerazione e velocità massima sono praticamente uguali. Possiamo concludere che per capire come si comporterà un veicolo è necessario esaminare la forma della curva di coppia, caso per caso.
E nelle auto elettriche?
Il motore elettrico, a differenza del termico, la coppia è erogata in modo molto più regolare e non sono presenti le “campane” tipiche del termico. Questo è un tipico andamento della coppia alle ruote e della potenza di un motore elettrico. Assomiglia molto al motore ideale che avevamo visto.
Cerchiamo di capirlo. La curva di coppia parte subito al suo valore massimo e tale si mantiene per un certo tratto. In questo tratto iniziale la potenza cresce linearmente da zero fino ad arrivare al suo valore massimo. A quel punto, valendo la relazione P = C * ω , aumentando ω la coppia deve decrescere non potendo crescere la potenza.
In termini di esperienza di guida un simile andamento della coppia si traduce in una spinta iniziale immediata, forte e regolare nei primi istanti, poi la sensazione di spinta scema con continuità senza gli andamenti sussultori dei motori termici che seguono l’andamento a campana della curva di coppia e le cambiate che per alcuni istanti azzerano la spinta (il tempo di azzeramento nei cambi automatici moderni è in realtà brevissimo, ma comunque resta sempre).
Così il cambio non serve più
Un aspetto notevole del motore elettrico è che non richiede la presenza del cambio (sono presenti pochissimi modelli che utilizzano un cambio a due marce per ottimizzare al massimo alcuni fattori). Il powertrain di una vettura elettrica richiede, oltre al motore, solo un riduttore/differenziale (come nelle termiche) che ha il compito di ridurre la velocità di rotazione e incrementare la coppia alle ruote in un rapporto fisso. Quindi è tutto molto più semplice dal punto di vista meccanico. Fa riflettere pensare a che meravigliose “cattedrali” di ingegneria meccatronica siano i moderni sofisticatissimi cambi automatici, e che servono a fare una cosa di cui il motore elettrico non ha alcun bisogno.
Ricapitolando:
- La coppia è definita come il prodotto tra la forza (F) e la componente perpendicolare della distanza rispetto ad un generico un punto e vale C = F *d.
- Un motore in grado di erogare una coppia C ad una certa velocità di rotazione ω, sotto carico sprigiona una potenza di valore P = C * ω.
- Quello che conta per muovere un veicolo è la coppia che arriva alle ruote. Alle ruote la coppia C si trasforma in una forza lineare che spinge l’auto di valore F = C / r, dove r è il raggio della ruota. Questa forza è resa possibile dall’attrito tra asfalto e pneumatico, altrimenti la ruota girerebbe a vuoto come sul giaccio.
- Le prestazioni di un motore non sono definite tanto dalla coppia massima che si trova ad un certo numero di giri del motore, ma dalla sua forma: un motore pronto ed elastico avrà una coppia che si alza subito e si mantiene piatta il più a lungo possibile al crescere dei giri.
- Il cambio (detto anche convertitore di coppia) permette di modificare contemporaneamente coppia è velocità di rotazione in modo inverso: nelle marce basse aumenta la coppia alle ruote a scapito della velocità applicando un alto rapporto di riduzione per permettere un’accelerazione maggiore; poi alle marce più alte tale rapporto si riduce in modo da permettere velocità maggiori con coppia alla ruota di conseguenza più bassa.
- Il motore elettrico ha una erogazione della coppia molto differente. All’inizio la coppia è massima fin da zero giri, e per un certo tratto si mantiene costante facendo crescere la potenza che cresce con la velocità di rotazione essendo P = C * ω. Raggiunto un punto limite la potenza resta costante e la coppia diminuisce in modo inverso (C = P / ω) al crescere dei giri.
- Per quanto detto l’auto elettrica produce una accelerazione immediata più forte fin dal primo istante rispetto ad un motore termico di potenza comparabile che deve “salire di giri” prima di esprimersi; inoltre non avendo una curva di coppia “a campana” e la necessità dei cambi di marcia la spinta risulta continua senza sussulti.
- L’auto elettrica non richiede la presenza del cambio ed è quindi meccanicamente molto più semplice
Ottimo articolo, ma molto scolastico rispetto al livello degli utenti di questo blog; da come tutti discutono e si infervorano, avevo intuito che la mia laurea in ingegneria fosse diventata omaggio con l’acquisto di una elettrica… Quindi a mio avviso sarebbe stato opportuno spiegare la lezione con un livello più universitario che da scuola superiore, magari con integrali, derivate, qualche differenziale. 😉
Si scherza, e complimenti all’Ing. Milani per la spiegazione semplice e per tutti e per il servizio pubblico e gratuito fornito.
Ottimo! Speriamo in altri articoli di questo livello! Grazie 🙂
Mi auguro che questo articolo la faccia finita col mito della coppia.
No, vabè, avercene,
Nulla può essere infinito, ma se parliamo di disponibilità di coppia rispetto al range del motore… diciamo che il tipo di erogazione che ottieni con un “modesto” motore elettrico, a pistoni ti ci vuole un 7000 V12 e pure fatto bene. 😉
Chiaro che se sei cresciuto a pane e RD500 e ti piace un certo tipo di erogazione c’è poco da fare, ma secondo me se parliamo di elettrico ci sono ancora tanti di quei conigli che girano dentro nel cappello e aspettano solo di essere tirati fuori…
Ma davvero… Ottimo articolo a cui rimandare ogni qual volta salta fuori “la coppia”.
Cosa si potrebbe aggiungere di interessante all’articolo gia piuttosto completo dell’ingegnere?
Be potremo dire che la forza di un motore elettrico viene “generata” nel punto di intersezione tra i campi magnetici di Statore e di Rotore.
Se questo “punto” si trova ad una certa distanza dal fulcro di rotazione, il braccio di leva contribuisce all’aumento della forza.
Come ben illustrato e indicato dagli esempi dell’ing.
Il fulcro non è nient’altro che il centro dell’albero motore…
Da qui ne potremo desumere che più è lungo il braccio di leva maggiore sarà la forza, cioè la coppia.
In molti motori attualmente usati nelle auto elettriche si sta utilizzando la configurazione con il Rotore centrale. Cioè interno allo statore.
Questo rotori hanno un braccio di leva più piccolo e quindi hanno anche una coppoa più bassa. Ad esempio sono quelli ad autoinduzione come quelli usati per la maggiore da Tesla…ma anche da altri produttori..
Mentre i motori con il Rotore, posto esternamente, cioè con lo statore interno, si riesce ad avere un diametro più grande e di conseguenza un braccio di leva più lungo.
Questi motori, definiti Oit-Runner hanno una coppia più corposa.
Se ben progettati, possono disporre di così tanta coppia da essere collegati al semi asse direttamente senza l’utilizzo di un cambio monomarcia a rapporto fisso, che spesso e chiamato riduttore di giri o convertitore di coppia.
Ma sempre di un cambio si tratta…
Se poi i motori sui semi assi sono 2, si potrebbe eliminare anche il differenziale.
Togliendo una volta per tutte quelle parti meccaniche così odiose e ancore connesse a vecchi retaggi progettuali risalenti a vetture endotermiche di 100 anni fa.
Il motori elettrici sono estremamente versatili, e usarli al posto di un motore termico è una umiliazione inaccettabile.
Oggi la maggior parte delle auto elettriche sono monomotore centriche, cioè hanno un solo motore come le vetuste auto a combustione.
Ma dove sta il progresso?
Togliamo un motore termico e lo sostituiamo con uno elettrico?
Troppo facile, e soprattutto troppo antico.
Le Auto Elettriche devono essere multi motore, 2 o 4 motori. Di potenza più piccola ma con grande coppia, sfruttando Rotori di grande diametro.
Per concludere,, e non essere troppo invasivo,la coppia di un motore elettrico si aumenta anche aumentando il numero di Poli, in pratica si ha relazione più Poli più coppia.
I motori ad induzione usati da Tesla hanno solo 2 Poli o 4.
Mentre i motori ad alta coppia hanno da 20 Poli in su…
Molte ricerche fatte da prestigiose università USA indicano proprio questo come futuro dell’auto elettrica….
I “poli” di un motore elettrico possono influenzare la regolarità dell’erogazione, non la coppia totale, che invece dipende dal l’intensità delle forze elettromagnetiche presenti nel motore stesso.
Inoltre, è vero che gli outrunner hanno più poli di un inrunner ma semplicemente perché sono applicati ad un diametro maggiore a parità delle altre caratteristiche del motore per cui, banalmente, ne servono necessariamente di più per coprire tutta la superficie.
Piuttosto, sarebbe interessante una valutazione dei motori con campo magnetico assiale, qualcosa che da poco è stata applicata nel mondo delle ev.
Comunque di motori elettrici ne esistono tanti e molto diversi tra loro. Alcuni, a 0 giri, hanno coppia nulla ma presentano altri vantaggi, e magari sono usati sull’asse secondario…
Con un motore elettrico per ciascuna ruota ed un software ben calibrato le opzioni sarebbero quasi surreali:
– superamento dell’Abs e dei freni per come li conosciamo, posto che ciascuna ruota sarebbe controllata da un motore;
– sterzo drive by wire e totale assenza di ponte anteriore o posteriore;
– possibilità, all’ingresso di una curva stretta, di bloccare o di ridurre la velocità della ruota anteriore interna alla curva, ottenendo un ingresso repentino non replicabile neppure con la più azzardata manovra rallystica;
– opzione di trasformare con un tasto la propria auto in trazione anteriore, posteriore o integrale secondo necessità o capriccio;
– possibilità di rendere tutte e 4 le ruote indipendenti e capaci di ruotare attorno al proprio asse senza limiti… Da qui parcheggi effettuabili spostandosi lateralmente senza fare manovra.
Il resto andrebbe secondo la fantasia dei progettisti, ma è chiaro che la possibilità di un motore dentro ogni ruota apra potenzialità inesplorate.
Sí è una soluzione che aprirá nuovi scenari ma credo che per adottarla su larga scala sará necessario risolvere diversi problemi tecnici (altrimenti si sarebbe giá diffusa). Fra le altre cose temo che esporrebbe troppo agli urti il motore e complicherebbe lo smontaggio della ruota, un pó come del resto succede nel settore delle due ruote dove è molto comune.
/// il powertrain di una vettura elettrica richiede, oltre al motore, solo un riduttore/differenziale (come nelle termiche) che ha il compito di ridurre la velocità di rotazione e incrementare la coppia alle ruote in un rapporto fisso \\\ Assodato che normalmente il “monomarcia” basta e avanza grazie all’erogazione “piatta” del motore elettrico, credo che sarebbe interessante sapere i criteri con cui viene stabilito detto rapporto fisso. Per esempio, secondo me è un pó controproducente voler far raggiungere la velocitá autostradale (o quasi) ai modelli utilitari segmento A/B a scapito della “fluiditá” in salita ma forse è solo una scelta di “marketing” che verrá ripensata man mano che si diffonderá la trazione elettrica.
Boh vabbè, un motore elettrico da 100 kw alla fine un rapporto che copra 0-150 kmh lo spinge bene dai.
Sí diciamo che con almeno 80/90 kW “cominciamo a ragionare” ma – sia pur con il rischio di estremizzare – mi riferivo a modelli come la Spring da 45 CV che hanno un rapporto un pó “lungo” per avvicinarsi al limite autostradale e quindi per non sfigurare troppo con le pari categoria a benzina.. Questo peró con la contropartita di un maggior sforzo in salita che secondo me potrebbe essere evitato (ho visto un video con la “Springhina” su una pendenza neanche troppo importante con l’indicatore della corrente a fondo scala)
-ho visto un video con la “Springhina” su una pendenza neanche troppo importante con l’indicatore della corrente a fondo scala-
eh… forse lì metti che una “ridottina”… 😉
Una ridottina piccola… piccola piccola… da passerottino… innocua… (cit: Don Camillo)
Benvenuto Ing. Milani e grazie per l’articolo!
“Così il cambio non serve più”
Nelle stradali concordo ma in pista può aiutare, vero Alle?
Se parlassi con l’ingegnere mi capirebbe al volo. E sarebbe d’accordo con me. Tra le righe mi da ragione, evito di citare le parti.
Qui l’argomento non interessa e quindi giustamente evito.
Resta inteso che quanto esposto dall’ingegnere è semplicemente perfetto e che per andare da A a B con um veicolo elettrico “normale” basta e avanza una marcia sola.
/// per andare da A a B con un veicolo elettrico “normale” basta e avanza una marcia sola \\\ In effetti in condizioni normali bastano dei valori decorosi di potenza e coppia, vedi anche articolo “parallelo” https://www.vaielettrico.it/a-che-pendenze-si-brucia-un-motore-elettrico/
Tra l’altro, e poi mi taccio, alla fine ho scoperto buon ultimo che le tesla a due motori hanno di fatto due marce. Quindi se anche il Divino ha ritenuto opportuno… 🤭🤭🤭
Dagli articoli che ho letto, il doppio motore di Tesla fá da trazione integrale che – oltre ad offrire eventualmente una funzione “boost” per le prestazioni – ha piú che altro lo scopo di distribuire al meglio potenza e coppia sui due assi per migliorare l’aderenza su fondi difficili e durante i trasferimenti di carico nelle forti accelerazioni. Vedi anche pagina “aziendale” https://www.tesla.com/blog/tesla-all-wheel-drive-dual-motor-power-and-torque-specifications Non so se questa configurazione possa “simulare” piú di tanto il cambio..
È un discorso più sottile.
Quello che dice lei è assolutamente corretto, rimane che il motore posteriore ha un rapporto al differenziale leggermente più corto rispetto a quello del motore anteriore. Sia chiaro: stiamo rasentando i sofismi.
Il risultato è che, come giustamente fa notare, in accelerazione, complice e anche in virtù del trasferimento di peso verso quell’asse, la vettura fa lavorare maggiormente il motore posteriore dotato di rapporto più corto.
Al contrario in velocità, quando è più sensato che a tirare sia il motore davanti, a lavorare maggiormente il motore anteriore con il rapporto più lungo. Idea tutt’altro che stupida aggiungerei
In ogni caso che li selezioni un manicotto con la sua brava forchetta o che vengano mossi da due motori distinti governati dal loro bravo algoritmo, sempre due rapporti diversi rimangono. 😉