
Prova guida autonoma Tesla: il nuovo FSD è stato testato con l’occhio di un ingegnere informatico esperto come Nicola Carlon. Ecco il suo giudizio.
 di Nicola Carlon
di Nicola Carlon
Non mi definirei un esperto di guida autonoma. Ma la laurea in ingegneria informatica con una tesi sulle telecamere omnidirezionali e le esperienze maturate negli anni mi hanno dato una buona familiarità coi sistemi di visione. Ho affrontato contesti molto diversi: dalla robotica industriale, dove l’illuminazione e l’ambiente sono controllati, alla navigazione autonoma subacquea. In cui ci si confronta con scenari variabili, scarsa visibilità e condizioni imprevedibili.
In generale, la visione artificiale ha l’obiettivo di individuare gli oggetti nell’ambiente e determinarne la posizione nello spazio. Le tecnologie usate sono molteplici. Ma la più precisa è la triangolazione laser, che fornisce rapidamente distanze millimetriche indipendentemente dall’aspetto dell’oggetto. Un’alternativa è la visione stereo, basata su una coppia di telecamere: utile in alcuni casi, ma richiede molta potenza di calcolo. E funziona bene solo in presenza di dettagli visivi marcati, cosa non sempre comune in ambito industriale.
Prova guida autonoma Tesla: “Ero perplesso sulla decisione di rimuovere il radar…”
Con questo bagaglio, la decisione di Tesla di rimuovere il radar, inizialmente mi aveva lasciato perplesso. L’idea di “proiettare” qualcosa nell’ambiente e misurarlo sembrava più intuitiva, soprattutto in un sistema che deve decidere se accelerare o frenare. Come spesso accade, si tende a semplificare quello che non si conosce. Il radar è efficace per funzioni come il cruise control adattativo in autostrada, ma non offre una comprensione completa dell’ambiente circostante.
E qui ci viene in aiuto l’AI (non entro nel dettaglio perché tra CNN, transformer e VLM vi annoierei). Capace di segmentare gli oggetti, correlare diversi tipi di dati e trasformare rapidamente input complessi in azioni di guida. Quello che è sicuro è che ci sarà sempre l’influencer di turno che troverà il modo di creare una condizione per cui il sistema fallisce. Come scriveva Hofstader nel libro che gli ha fatto guadagnare il Pultizer “Goedel, Escher, Bach: un’eterna ghirlanda brillante“, un giradischi potrà avere un arbitrario livello di complessità per suonare milioni di dischi.
Ma esisterà sempre un disco specifico che se suonato, romperà il dispositivo facendolo andare in risonanza. L’episodio della Model Y che si schianta contro un pannello che riproduce la strada è un esempio di test estremamente lontano dalle condizioni reali. Tanto quanto lo sarebbe puntare un laser su un lidar o disturbare un radar con un jammer. L’approccio corretto è statistico: l’obiettivo non è affrontare l’improbabile, ma gestire i casi reali meglio di quanto farebbe un essere umano. Che può distrarsi, violare i limiti o commettere errori.
 “Con incredibile naturalezza supera un pick-up piazzato in mezzo alla strada”
“Con incredibile naturalezza supera un pick-up piazzato in mezzo alla strada”
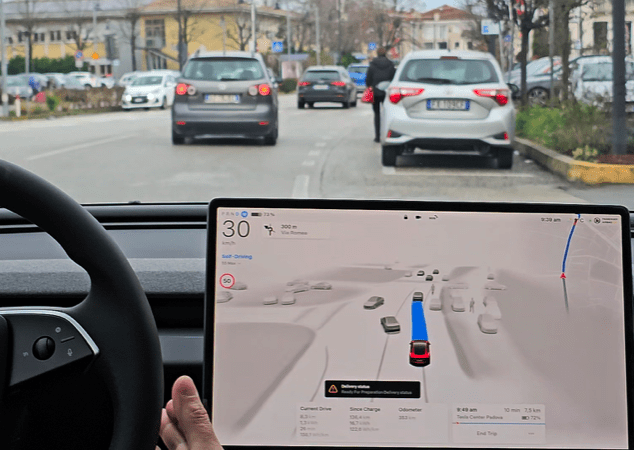
In questo senso è cruciale la raccolta dei dati. Con più di 6 milioni di veicoli in circolazione, Tesla accumula ogni giorno l’equivalente di 500 anni/uomo di guida. Provenienti dalle telecamere e soprattutto da come noi guidatori utilizziamo sterzo e pedali. Su questa base è stata addestrata un’AI capace di muoversi nel traffico reale. Il test che ho fatto venerdì scorso attraverso la provincia di Padova mi ha dato l’impressione di un notevole passo avanti rispetto al “vecchio” Autopilot avanzato. Che, in confronto, appare più rigido e limitato.
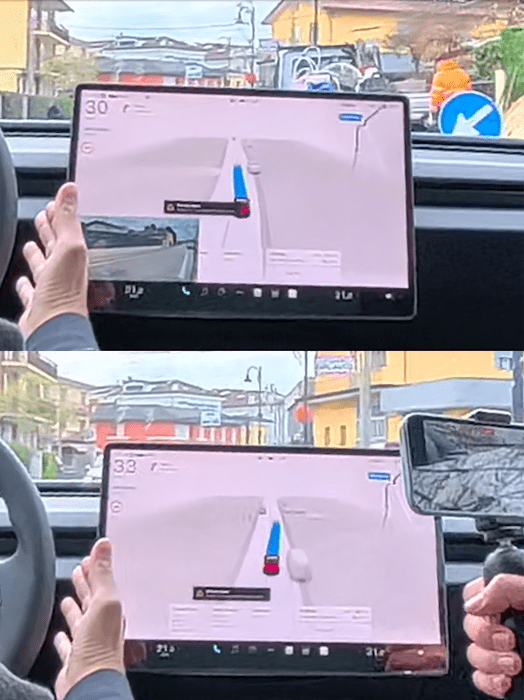
L’esperienza di circa un’ora ha incluso strade strette, lavori in corso e varie situazioni non standard. In più di un’occasione il sistema ha compiuto manovre ragionate e naturali, simili a quelle di un conducente esperto. È stata incredibile la naturalezza con cui ha superato un pick-up parcheggiato che occupava poco meno di metà strada. Invadendo la corsia opposta nonostante la linea continua, dopo aver opportunamente messo la freccia e rientrando subito dopo, esattamente come avrebbe fatto un guidatore umano. Un cruise control adattivo si sarebbe fermato fino al termine dei lavori.
Prova guida autonoma Tesla: “Prudente quando serve, ma decisa al momento giusto”
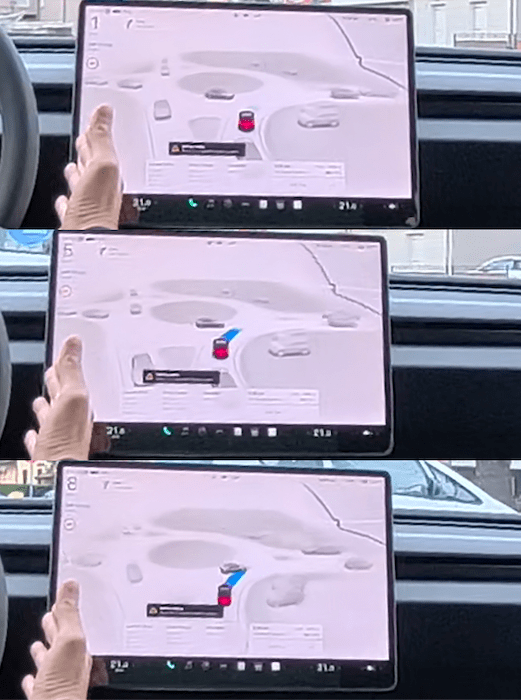
Mi ha stupito particolarmente anche nella gestione delle rotonde. Non attende di avere la strada libera, ma parte già prevedendo che l’auto appena passata prosegua. Ovviamente tenendosi margine per rallentare se la sua predizione non si fosse avverata. La stessa cosa vale per le traiettorie: capisce che l’auto in arrivo sta per uscire dalla rotonda anche se non ha messo la freccia e agisce di conseguenza.
L’unico momento in cui l’ho visto incerto è stato negli ultimi cm. di parcheggio: il marciapiede era particolarmente alto. E non si è fidato di andarci sopra con il parafango posteriore. Conoscendomi, io l’avrei fatto, ma con buona probabilità di fare danni… Se dovessi descrivere lo stile di guida del sistema lo definirei “equilibrato”. Prudente quando serve, ma anche deciso al momento opportuno, con accelerazioni e frenate fluide. La mia singola esperienza personale non è sufficiente a fare statistica, ma i dati accumulati (oltre un milione di miglia) sembrano confermare le mie sensazioni positive. Per approfondire,qui trovate la presentazione tecnica di Ashok Elluswamy (VP Tesla AI Software) all’ICCV 2025. E qui le statistiche ufficiali.
– Leggi anche:  FSD Tesla, la dimostrazione su strada con il sindaco di Roma
FSD Tesla, la dimostrazione su strada con il sindaco di Roma
- Guarda anche il VIDEO di Filippo Pagliuca
Leggo ora che negli USA, con la versione 14.2.1, qualcuno ha fatto un viaggio di 3.000 miglia (alla faccia degli esperti nostrani che si preoccupano di poter fare lunghi viaggi con un’EV!) con 0 (ZERO!) interventi manuali!!! Inclusi lunghi tratti di highway, strade urbane e parcheggi nei Supercharger. Tutto in modo automatico e sicuro, grazie al fatto che l’auto vede più del pilota e non ha cali di attenzione.
https://x.com/DavidMoss253/status/1998159737041334464
Sono a disposizione se avete domande!
Concordo su tutto. E’ davvero notevole il livello raggiunto. Già ora sarebbe più che sufficiente al 90% dei viaggi che uno compie. Del resto, se mettiamo da parte l’obiettivo di essere unsupervised, non sarebbe già perfetto avere quel livello di automazione ben consapevoli che tanto ci siamo noi a prendere in mano la situazione dovesse compiere una scelta errata?
Io non vedo l’ora che l’EU e l’Italia lo sblocchi. Non ci si rende conto di quanto siano utili questi sistemi finchè non si provano.