
Che cambiamenti porterà il digitale nel mondo dell’automotive. Non sarà proprio quella la vera rivoluzione, ancor più che il passaggio dalla trazione termica a quella elettrica? Su questi temi si interroga l’ing. Gianni Catalfamo, fondatore di OneWedge, amico di Vaielettrico e autore del libro “Cento risposte (e oltre) alle tue domande sulle auto elettriche” in questo articolo che anticipa i contenuti di un convegno che si terrà a Modena il 18 novembre.
di Gianni Catalfamo
 Ma siamo proprio sicuri che l’auto sia la vera rivoluzione?
Ma siamo proprio sicuri che l’auto sia la vera rivoluzione?
C’è chi è convinto che in realtà si tratti solo della proverbiale parte emersa dell’iceberg. E che, in fatto di innovazione radicale, il settore Automotive sia solo all’inizio di un percorso nuovo e pieno di sorprese. Già da molto tempo infatti il controllo di un’auto è affidato sempre più ad una pletora di sensori che leggono la strada, lo stato dell’automobile, le condizioni del guidatore e prendono decisioni o propongono interventi.
Introdotte via via in modo granulare come sottosistemi sostanzialmente indipendenti tra di loro, questi stanno raggiungendo un grado di complessità e di interconnessione tale da rendere inevitabile una coalescenza in un unico sistema di controllo, monitoraggio e governo: insomma, da una molteplicità di sottosistemi indipendenti si arriverà ad una unica piattaforma digitale.
Effetto digitale, dalla macchina da scrivere al PC
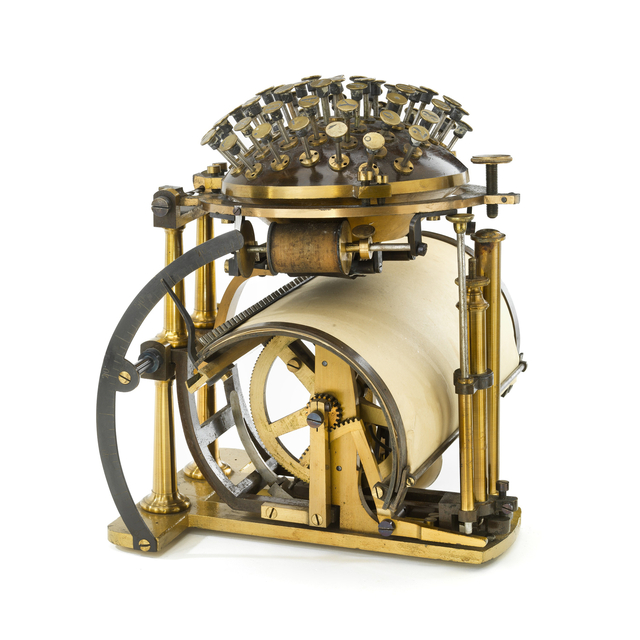
Questo andamento non è una novità: la stessa cosa infatti è successa in ogni dispositivo che sia stato digitalizzato. Chi ha qualche anno ricorda ancora la macchina per scrivere,
elemento essenziale del lavoro di ufficio: la storia della sua invenzione ha radici profondamente italiane, ma il primo prodotto commerciale arriva nel 1870, la Hansen Writing Ball1 prodotta in Danimarca, seguita poi da innumerevoli altre
aziende tra cui la gloriosa Olivetti. Anche in questo caso, l’avvisaglia della rivoluzione fu
l’elettrificazione che in realtà iniziò anch’essa verso fine ‘800, anche se ci vollero una trentina d’anni perché si affermasse, al punto che nel 1935 la IBM otteneva l’8% del suo fatturato dalle macchine per scrivere elettriche.
Ma ben altra era l’onda lunga del cambiamento. Alla macchina per scrivere prima si aggiunse uno schermo per scrivere e correggere prima di mettere su carta. Ma nel 1968 Douglas Engelbart (un ricercatore di Stanford) presentò “la madre di tutte le dimostrazioni” dove illustrò concetti che oggi sono di uso quotidiano come la posta
elettronica, il word processing, i fogli di calcolo che avrebbero assunto vesti molto vicine alle attuali nella metà degli anni ‘70 con il lavoro del PARC della Xerox.
CC BY-SA 4.0
In questo cammino emerse per la prima volta una linea di tendenza che si sarebbe poi ripetuta in tutte le grandi digitalizzazioni. La suddivisione del software, con un sistema operativo sul quale vengono sviluppate applicazioni. Questo grazie alle “chiamate” che permettono a chi sviluppa ad esempio di invocare il comando “Stampa” senza preoccuparsi di quale stampante sia collegata al computer.
Il frazionamento della catena del valore del software fa emergere prepotentemente l’importanza chiave che assume un sistema operativo quando viene adottato da molti produttori di dispositivi. Ma anche la straordinaria ricchezza rappresentata da un ecosistema di sviluppatori che affronta e risolve i più svariati problemi utilizzando l’hardware tramite il sistema operativo.
Col digitale anche l’auto non sarà più monolitica
I ruoli cambiano. Non più un prodotto monolitico, di cui la casa produttrice ha immaginato tutti e soli gli impieghi, ma un sistema aperto. Una vera e propria piattaforma che ospita la creatività e fantasia di una molteplicità di interpreti di mercato.
Sono scenari entusiasmanti, e il 18 novembre nell’evento “Lezioni di Futuro: l’Automotive
interroga il Digitale” organizzato da NiEW (leggi) cercheremo di tratteggiarne i contorni essenziali
anche grazie all’aiuto di chi c’è già passato, per immaginare il mondo di opportunità che questa trasformazione inaugura per le Case, per i consumatori, e per chi saprà ritagliarsi uno spazio in questo nuovo mondo della Mobilità Digitale.
Le auto non sono e non saranno mai sistemi aperti, sarebbe la follia totale sia per sicurezza che per i profitti delle automotive.
Se ci va bene negli anni ci creeranno una piccola area dove installare qualcosa ma sarà come Android auto e relativo Apple, solo app iper selezionate e a loro volta chiuse.
(tesla che fa girare un gioco sull’auto non è l’esempio per dire che è un sistema aperto)
Soprattutto l’errore che stanno facendo è proprio quello che accorpare tutta l’elettronica sotto lo stesso controller, han progettato così gli aerei di linea e son tutti hackerabili per prenderne il controllo (perché han previsto di poterlo fare dalla torre di controllo in caso di problemi ma se apri la strada.. Chiunque può imparare a usarla)
La cosa più intelligente è invece separare completamente l’elettronica di controllo con quella infotainment.
Oggi soprattutto han fretta di farle uscire, sw così non li sviluppi in sei mesi e una pacca sulla spalla, pure tesla che ci lavora da che è nata spuntano bug più o meno importanti, il futuro sarà del sw quello è sicuro, ma lo sarà come lo sta improntando tesla, io ti do l’auto con tutto il necessario, poi se vuoi la guida autonoma mi dai altri 8k,se la vuoi limitata però solo 4k,se vuoi che premi un tasto e l’auto urla il tuo nome dagli altoparlanti esterni sono 500€…se vuoi upgrade di cavalli.. Sono altri 3k euro etc etc… Questo è tutto fuorché aperto, anzi chiuso chiusissimo come nemmeno apple nei suoi sogni più goduriosi potrebbe fare
Non sono contrario alla guida autonoma con una IA molto avanzata, ma sicuramente non subito la tra qualche anno sicuramente ci si riuscirà, ma le leggi vigenti dovranno evolvere in tal senso le strade dovranno essere in condizioni ottimali non decadenti come ora, che se prendi una buca l’auto si sposta e cambia direzione, le responsabilità dovranno cambiare, perché in caso di incidente non sarà più colpa del proprio ma del produttore del mezzo, e poi cosa più importante essendo gestiti da software saranno vulnerabili aggi attacchi informatici, quindi infrastruttura dev’essere blindata ma sarà pur sempre a rischio, e più la rete sarà veloce maggiore sarà il rischio, benvenga ma con molta attenzione.
La guida autonoma è ahimè totalmente non matura, perché anche non lo siamo noi, dovremmo per assurdo essere noi pedoni a star attenti a come ci muoviamo per essere visti dalle auto nel modo giusto, tipo per attraversare la strada, ci arriveremo ma quando ci arriveremo sarà con un grosso adeguamento delle strade e viabilità, sotto/sovra passaggi per pedoni nelle città ovunque etc..
Il vantaggio grosso della autonoma totale su tutto il parco auto è l’eliminazione dei limiti di velocità all’interno delle città, abolizione dei semafori, degli stop e precedenze, praticamente sbloccando quasi completamente il traffico tira e molla delle città ma appunto non si può fare finché ci saranno ancora auto a guida manuale, probabilmente si inizierà con corsie preferenziali e via via a tutto..
Ma ahimè non sarà possibile prima di 10/20 anni… Son cmq ia che consumano farle girare su auto.. Sarebbe più sensato un sistema centrale “della provincia” o della singola città enorme che coordina il grosso dei movimenti, e le auto switchano da un gestore all’altro se si spostano… Ma così le automotive non fanno soldi quindi.. Ognuno farà la propria e ci sarà il caos totale per decenni con i soliti problemi di interoperabilità che si conoscono da anni nel mondo informatico
Ma di fatti io ho detto che le strade dovranno essere adeguatamente, e con questo c’è tutto dai semaforo per i pedoni che comunque già ora in molti Stati ci sono e funzionano alla grande, mentre da noi mettono le strisce pedonali dopo pochi metri dal incrocio o al uscita da una rotatoria, che per metterti in strada devi guardare dalla parte opposta delle strisce, per gli umani è difficilissimo tenere sotto controllo due punti opposti, speriamo che la tecnologia sia più capace di noi, visto che le situazioni pericolose le andiamo a creare.
I semafori per i pedoni cosa intendi? Un normale semaforo che diventa rosso solo su prenotazione del pedone?se son quelli… Oddio a usarli in città vuol dire che resta rosso più della metà del tempo, già oggi capita di continuo di vedere gente che li usa da str*o, aspetta che sia passato qualcuno per finire di chiacchierare e premere di nuovo etc etc (rotonda villa reale di Monza per chi conosce è l’esempio perfetto)
Le strade boh nella mia testa l’ideale sarebbe togliere l’equazione pedone creando le sopra elevate etc etc, ovviamente ovunque è impossibile ma aiuterebbe, cartellonistica nuova e mirata per le auto autonome e tanti altri bla bla…che però francamente pur se fattibili già oggi… Resta nella fantascienza perché bisognerebbe spendere.. E ora le priorità son far cambiare auto verso elettrico, agli stati frega relativamente poco della guida autonoma, troppe responsabilità che non vogliono nemmeno prendere in considerazione, se va bene bene avremo tra max 5 anni la semi autonoma stile tesla per le autostrade e il resto si rimanda a tra 30 anni.. Peccato perché sarebbe l’inizio per togliere l’auto privata e pagarla solo se ti serve, per tanti in città farebbe una differenza assurda per comodità e stile di vita.. Dimenticarsi di cercare parcheggio!!
Si ma non come funzionano in Italia, sono stato in ferie e sono rimasto strabiliato schiacci la prenotazione 10 secondi e puoi passare e giusto il tempo di passare ed è di nuovo rosso, e guidare in quelle strade è stato senza ansia che un pedone ti attraverso al improvviso , arancione e poi rosso le auto a differenza di noi si fermano 🤷
Diciamo che qui manca l’educazione stradale a tutti oltre l’educazione civica.
Lanciata la traccia, curiamo lo svolgimento. Ipotizziamo che oggi abbiamo una macchina da scrivere: che strumento useremo domani?
Partiamo dall’analisi del presente: Level 1: ABS, TCS, infotainment, navigatori. Level 2: adas, app, giochi, cinema, dashcam, sentinel, comandi vocali avanzati, comandi da smartphone. Level 3 (domani): autopilot, comunicazioni v2v (vehicle to vehicle), ia. Level 4 (dopodomani): interfaccia digitale/neuronale uomo/macchina.
È strano a dirsi, ma se pensiamo alla ia forse l’auto è un terreno meno complesso di altri apparentemente più naturali. L’hardware c’è già (è la stessa auto, ovviamente con hw dedicato) e le interazioni sono tutto sommato limitate (non chiedi alla tua ia in auto di darti un parere psicologico sul comportamento di una tua amica): insomma una ia automobilistica si “addestra” più facilmente.
Non a caso, chi è quell’imprenditore che ha una società che investe nelle interfacce neuronali uomo macchina e ha supercomputer per allenare la ia e dispone già del miglior autopilot di tutti? È Diess o Musk? Ah, saperlo…
Il livello 4 non è l’interfaccia uomo auto… Vorrebbe dire tornare a dare il controllo della guida alla persona che è proprio quello che si cerca di evitare
Il liv 4 è la totale automazione, rimozione pedali e volante e qualsiasi necessità di intervento umano diverso dal decidere dove andare.
L’allenamento della ia è cosa buona e giusta, ma resta cmq il problema del hw limitato, una fotocamera per quanto ottima e iper gestita sa un sw che ti riconosce anche la direzione dello sguardo dei pedoni per anticipare i movimenti.. Comunque in situazioni di forti nevicate/piogge che cmq a volte capitano, non hanno niente da analizzare perché la visuale è coperta (stesso motivo per cui han tirato fuori i laser per rimuovere lo sporco dalle lenti delle camere)
Al contrario i lidar e infrarossi questo problema non lo hanno in modi diversi.
Tesla ha scelto le telecamere perché ad oggi costa molto meno tirar su una ia e addestrarla che comprare tot lidar è ir (in aggiunta alle telecamere normali che sono comunque fondamentali) per ogni singola auto.. Il costo della singola unità salirebbe troppo è non venderebbe come vende ora.
Le sole telecamere vanno benissimo oggi fino al livello 3,dove comunque è prevista la supervisione delluomo quando lei non cela fa.
In previsione del liv 4 anche tesla vedrai che tornerà ad aggiungere di nuovo lidar e ir o una soluzione ibrida, quando non ci sono più pedali e volante non puoi permettere che l’auto si fermi perché non può sapere se durante una nevicata per sbaglio è caduto un ramo più avanti o è certa di non vedere eventuali pedoni, quella non sarebbe un livello 4
Un’altro discorso è che non parte in condizioni di meteo troppo avverso, ma se sei in viaggio quando resti sorpreso dal meteo non può restare immobile fino alla fine, magari dura ore
Potrei dire visto che le sto utilizzando le telecamere a scansione laser il problema è che costano come un utilitaria elettrica senza incentivi, il primo passo è ridurre i costi degli strumenti e implementare i software per gestirli , attualmente servono per i controlli qualità o controlli di precisione in ambito robotica industriale che ovviamente su impianti da qualche milione di € incidono poco, ma su un auto sarebbe una follia
E’ un tema dibattuto da molti anni. Il punto critico riguarda la sicurezza e la disponibilità al 100% di software di tipo generale per l’uso su macchinari che richiedono elevati livelli come i veicoli (terrestri o aerei che siano).
Tempo fa girava la domanda se ci si sarebbe tranquillamente affidati a un aereo che avesse utilizzato come sistema operativo per tutti i sottosistemi Windows, con il rischio che nel bel mezzo dell’atterraggio sullo schermo dei piloti comparisse la tanto temuta “schermata blu” che richiede il riavvio fisico del computer…
Come si è visto recentemente, anche il software scritto con molta cura per i grandi aeromobili commerciali può contenere errori che determinano conseguenze catastrofiche.
Per arrivare a sistemi aperti di affidabilità accettabile occorre che si superino questi problemi.
Dai non scherziamo Windows, Linux o iOS non sono adatti ad un uso né industriale tanto meno per uso a livelli così elevati per una guida autonoma, in oltre vent’anni non ho ancora visto un crash di un qualsiasi robot che fa produzione, hanno dei linguaggi propietari e le routine sono più che collaudate.
Su base Linux (unix) girano tutti i bancomat.. I robot da produzione han cmq basi Linux in alcuni casi diffusi, il fatto che te non scrivi nella shell non vuol dire che non c’è un os, son sistemi chiusi molto più elementari rispetto a un pc desktop qualsiasi e di conseguenza non vedi crash, meno cose può fare più e facile far filare tutto liscio.
Capisco cosa vuoi dire, ma è l’esempio sbagliato
Le banche girano in COBOL e impianti ad alta tecnologia hanno sistemi in assembly propietari poi interfaccia utente può essere in qualunque linguaggio.
Detto questo ci vorranno più di qualche anno per arrivare a un IA autonoma
Assembly non è proprietario, ci programmavo in prima superiore, assembly è semplicemente il linguaggio macchina più basso che sia possibile programmare e compilare (si, i codici poi si compilano in base al processore che utilizzano) in assembler il 90% delle istruzioni che dai sono spostamenti di informazione da un registro a un’altro, e questo spostamento può essere usato per addizionare sottrarre, e chi più ne ha più ne metta, il codice binario inserito.
In assembler fai anche programmi per Windows, ad esempio l’ambiente di sviluppo che usavo lo aveva scritto da zero completamente in assembler il professore dell’istituto più di trent’anni fa…
Dopo aver contestualizzato cosa è realmente assembler… Ti ricordo che sia cobol che assembly, che c, java, python,Pearl, htm, html htmls…. Sono linguaggi di programmazione non sistemi operativi… Stai paragonando le regole grammaticali a un romanzo di un milione di pagine.
Per fare un esempio ancora più specifico… Crei un progetto cad/cam e lo mandi in produzione sui macchinari col sistema tutto integrato che oramai nell’industria 4.0 ha in modo diffuso… Il tuo sistema operativo è quello che usi sul pc e sul server che tiene la rete (generalmente base unix per la snellezza di codice e i secoli di lavoro sulla sicurezza) , poi il sistema compila il tuo progetto in linguaggio macchina perché sia comprensibile al tuo tornio o fresa o quello che vuoi, in quel momento non solo traduce il disegno ma va anche a dire in che ordine eseguire le operazioni per arrivare al risultato corretto, non è niente di diverso dalla programmazione per coordinate che si fa con la via di mezzo (tecnologica) con le macchine a controllo numerico non collegate tra loro con le feature date da industria 4.0,che non è solo mettere in rete i macchinari ovviamente.
Non te ne faccio una colpa, anzi, mi sorprende anche che qualcuno che probabilmente non è mai stato appassionato di questa area dell’informatica, sappia che esiste cobol, il problema è che da questo punto di vista c’è una ignoranza mostruosa creata soprattutto dallillusione che molti hanno di essere esperti perché usano Facebook dal primo giorno e sanno usare i social o hanno usato la shell di dos due volte per vedere il ping della rete.
Pensare di capire a fondo qualcosa quando in realtà nemmeno si è grattata la superficie è estremamente pericoloso e soprattutto in una fase come quella delle auto sempre più tecnologiche permette a chiunque di dir mezze cose per attirare opinione pubblica o consenso, non parlo ovviamente di noi che ci parliamo qua, ma del marketing e articoli ad hoc con qualche termine plausibile che li rende realtà per chi non ha le competenze per andare oltre le parole e fare le sue riflessioni
A livello di completezza, c’è da considerare anche la complessità di un sistema operativo, più questa cresce più i problemi possono aumentare (soprattutto quando è richiesta interoperabilità tra sw fatti da persone diverse)
Per fare un paragone, un sistema operativo per una macchina da produzione come torni frese presse etc, è come fosse il puzzle 2s di una nave da crociera, un os come Windows o macos o quelli per mobile sono le reali navi da crociera, con tutta la progettazione di impianti elettrici, meccanici, materiali, galleggiamento, arredamento, infrastrutture dei bar ristoranti cinema piscine sale giochi, le connessioni di rete interne per gestire tutto da illuminazione delle cabine alla navigazione satellitare.
Un os per auto a guida autonoma è grosso modo una via di mezzo tendente al basso, si può dire una nave in bottiglia iper dettagliata, di cose ne deve fare relativamente poche e buona parte sono eseguite a livello di hw e non sw (come nelle schede audio ad esempio)
Guarda che lo so che sono linguaggi, visto che arrivo dal lontano 85, ma come ti dicevo è una specie di assembly visto che è un linguaggio propietario, comunque sia ci sono sistemi operativi molto ma molto migliori di quelli che si usano su PC tradizionali, soprattutto se hanno in mano la vita delle persone, ecco ora un dato c’è l’ho non vorrei assolutamente una guida autonoma basata su Windows o Linux o Unix o iOS sarebbe l’unica auto che non comprerei neanche se me la regalano.
Detto questo chiudo OT
(stessa leva) Nella stragrande maggioranza dei casi, quelli che tu intendi come sistemi operativi, sono versioni tagliate di unox/Linux, non per altro ma perché è gratis e puoi renderlo chiuso facilmente quando serve eseguirlo su macchine meno complesse di un pc o server ed è costantemente aggiornato da più fonti.
Quello che te paragoni al assembly ok, ho capito ora cosa intendi, si sono versioni proprietarie ma sono cmq linguaggi alla stregua del Basic o qbasic, coordinata e azione, ma questo avviene quando la programmazione è manuale non in rete, come ti dicevo nel caso di progetti in cad cam, quel passaggio viene (quasi) saltato e viene compilato direttamente in linguaggio macchina binario per farlo eseguire, lho fatta semplice per chi non è avvezzo.
Cmq no, nessuno vuole un’auto gestita alla base da Windows o Mac OS, sono totalmente inadatti, al massimo in futuro creeranno un’area di memoria staccata dal resto in cui si potrà installare a parte come fosse un pc in auto ma nulla più.
È invece molto probabile che alcune parti invece siano basate su Linux, chiaramente non la parte ia che penso funzioni in modo totalmente diverso, ma la parte del kernel alla base di alcune funzioni potrebbe tranquillamente esserlo, anzi è auspicabile per il consumatore per sperare in una migliore interoperabilità tra costruttori nel futuro, non mi stupirebbe se invece ci saranno 2 o 3 aziende che sviluppano la guida autonoma e la vendono e adattano poi per le singole case/modelli
Cmq non mi pareva un ot, sempre di guida autonoma si parla tra le righe
Quello che intendevo è che non sono versioni tagliate, ma vero e proprio OS proprietario con poi il suo linguaggio di programmazione, e in più di vent’anni non ho ancora visto un blocco del sistema in compenso ho visto una vera evoluzione del OS e del linguaggio di programmazione, se dovessi fidarmi di qualcosa di stabilite sicuramente quello.
Ovviamente per una guida autonoma la strada è abbastanza lunga e intendo una guida umana senza errori e ci si potrà arrivare solo quando nessuno guiderà più e le auto saranno tutte connesse infrastrutture comprese quindi prima del 2040 la vedo al quanto improbabile forse oltre il 2050 ma vorrebbe dire cominciare una progettazione di auto e infrastrutture a lungo termine, e tenendo conto che le auto secondo i produttori dovrebbero essere cambiate ogni 5 anni la vedo molto ardua.